MFS SOFTWARE
MFS motion control software specifications General to all software (included with any purchase)
- Easy and quick software setup. No driver installation, no library installation. Runs on every windows PC. Just copy-paste and run. Thus, no need for installing USB drivers and conflicts, …
- 100Mbps Ethernet connection to the motion controller gives you plug and play access to the motion controller. The high bandwidth of this standard communication channel ensures maximum performance of the motion platform servo drives giving you quick response time to get the best out of your system. This makes it possible to simulate for a wide range of applications, from slow soft movement to rough and very hard vibration.
- Ethernet connection also allows you to place your motion control PC wherever you want. Easy to find cables, easy to find switches, etc.
- Auto-monitoring / auto recovery system: the software provides a robust interface to the motion controller and the platform. Any disconnection is auto-recovered to avoid interruption.
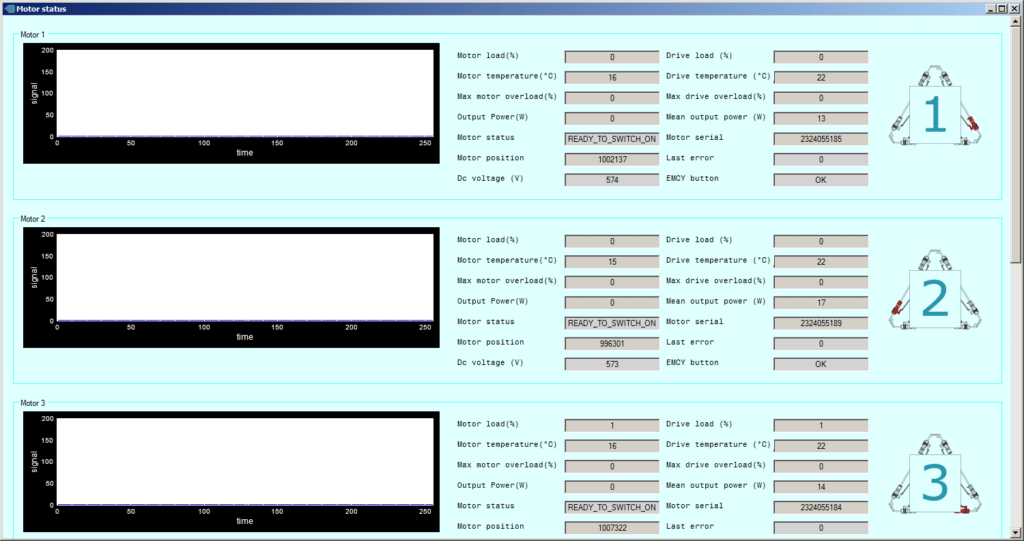
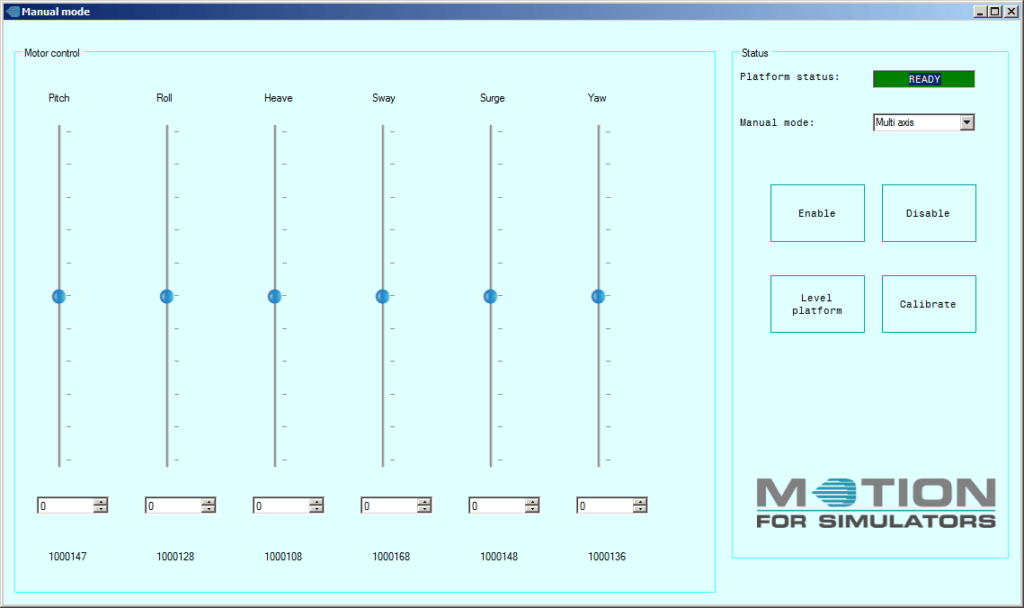
- Load indication: At all times the load of the motors can be monitored from the main screen. This will guarantee maximum performance at all time. • Easy manual control of each axis. They can be individually controlled or in a multi-axis mode. This allows maximum working flexibility for setup and service of your system.
- Quick and easy configuration of the platform settings. The entire platform behavior can be adapted to the needs of your setup.
- You can adapt each axis separately and reduce excursions if needed. You can reduce the platform in restricted space and remove limitations once the system is placed in a bigger room.
- Extended troubleshooting possibilities: the status of each axis can be monitored at any time. Our diagnosis screen which allows us to monitor different parameters of the motors like temperature, error codes… This makes it easier for our support team to offer quick and appropriate support with minimum effort and minimum downtime for your system.
- Motion recording: platform motion recording will provide you with a visual image of your last simulation. This will help you to tune the parameters (washout filters, landing impact…) of your simulation to its maximum. Getting a visual image of your simulation is very important to understand the motion behavior and to compare different sets of parameters. • Easy remote support • Easy remote firmware and software upgrade
“MFS MAINTENANCE SOFTWARE” (included with any purchase)
- Verify the motion system for functionality • Motor and drive load indication
- Move and calibrate the platform • Manual control of each axis
- Reassign neutral position and set limitation to the axis
- Troubleshooting
- Motion recording
- Seamless importation of motion signals created using Excel or Mathlab
“MFS 3D PLATFORM EMULATOR”
- View platform motion without the platform ( require a license and hardware : a motion controller and cables)
- Recommended for developers

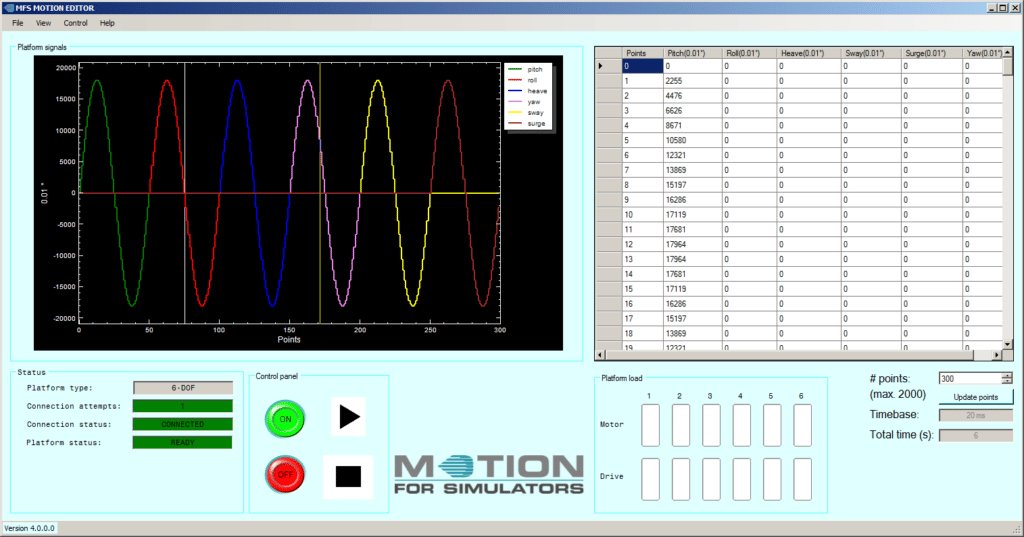
“MFS MOTION EDITOR”
- Create highly customized motion profiles
- User friendly trajectory editor
- Easy on the fly profile adaptation
- Superimposition of tunable motion primitives
“MFS PRECISION SOFTWARE”
- This software removes the non-linearities within our motion controller. In addition, the software allows the center of the moving platform coordinate system to be moved anywhere. The software can determine the location of a point(s) on a Unit Under Test in free space such as in antenna testing. As part of the Precision Control Software, a Dynamic Software Evaluator reads the feedback pots from each of the six actuators and calculates the roll, pitch, yaw, X, Y, and Z position of the motion base moving platform. The positions can be sent to the computer so that the user knows exactly where the motion base moving platform is at any time. This allows our 3D emulator to work (the geometry of our systems being programmed within our motion controller for maximum precision.
“MFS ENTERTAINMENT RIDES”
- Software is primarily used in the entertainment industry to program a ride profile to a predetermined video or entertainment production.
- Easy edition of motion profiles
- On the fly edition
“MFS FLIGHT SIMULATOR SOFTWARE”
- Ultra-simple installation (copy and run exe / click FLY – PAUSE – STOP – PARK)
- Fadeout braking system (tunable) to avoid rough and unrealistic shocks.
- Ultra-realistic motion cueing based on the best thesis and fine-tuned with flight instructors from renown airlines and pilots
- Highly customizable motion cueing: The motion cueing algorithm provides a realistic simulation of all-important parts of simulation. (Turbulence generation, take off force feedback, braking push forward, landing touchdown, terrain vibration on the ground, washouts for all movements such as pitch, roll, sway…)
- For every simulation, a profile can be selected or generated to optimize the motion and washout filters in every situation. Standard profiles for most common vehicle are available (Airliners, GA, Helicopters, truck, racing car, boat, spaceship …). They can be selected, copied or optimized and fine-tuned according to your needs.
- Strong community of flight simulation enthusiasts
“MFS SEA STATE PROFILER”
- This software performs up to Sea State level 12 as long as the motion system can perform to that specification. This software is used, but not limited to, testing the stability of modern transmitting/receiving equipment for seaboard use, simulation of on board landing deck for drones…
- Prerecorded motion scenario available (sea motion in different condition)
- Note : When simulating sea state motion on a motion platform with limited excursions, it’s crucial to ensure that the generated motion signal remains within the physical capabilities of the platform. The motion signal is thus scaled to fit within the available excursions of the platform. While scaling addresses amplitude limitations, filtering techniques are applied to handle frequency differences. The full spectrum of sea waves may include high-frequency components that, when directly applied to the platform, might exceed its capabilities. Filtering involves adjusting the frequency content of the simulated motion to align with the platform’s response characteristics. By employing filtering algorithms, the simulation can retain the essential features of the sea state while adjusting for the platform’s natural limitations. This ensures a nuanced and accurate representation, even in cases where the full wave height surpasses the physical excursions of the motion platform. For example, if the platform can handle ±40 cm of heave, the simulated heave values are scaled to stay within this range. Filtering techniques are applied to modify the frequency content of the simulated motion. This ensures that even though the full wave height of extreme sea states may exceed the platform’s excursions, the essential characteristics of the sea state are retained.
“MFS FLAIR BRIDGE”
- Flair is the culmination of 50 years of robotics experience, resulting in the industry-leading software solution for motion control camera robotics. Quite simply, there is an infinite number of possibilities you can do with Flair when it comes to creative robotic camera movements. From simple arcs, orbits and linear motions, to much more advanced features and control, resulting in pixel-perfect repeatable motions — Flair is the tool every creative dreams of! https://www.mrmoco.com/motion-control/flair/
- MFS provides a software that will let you control our motion platform from within FLAIR



“MFS CUSTOM SOFTWARE”
- Tailored to meet your needs
- On request
SOLUTIONS FOR DEVELOPERS
Developers can control our motion platforms in 2 ways :
- The .NET DLL (API.DLL) holds easy access functions to control our motion controller (For instance: enable platform, disable platform, setPitch, setRoll, etc). This DLL can be integrated into the customers own proprietary software package. An API document describes all available functions.
- The MFS Ethernet protocol is used to control the MFS motion controller. The protocol is TCP/IP based and allows customers to control the platform from another Ethernet capable embedded controller or other non-windows hardware. The protocol is described in a single PDF document.